The dataset challenge consists in tracking 3 rigid, poorly textured, highly occluded objects across sequences of monocular RGB images.
For each object dataset, we provide:
- a simple CAD model of the object (.obj)
- several learning videos
- one or more testing videos
- the groundtruth pose of the camera wrt the object reference system for all the learning videos
- a simple Matlab script Test.m showing how to employ the pose groundtruth.
BOX
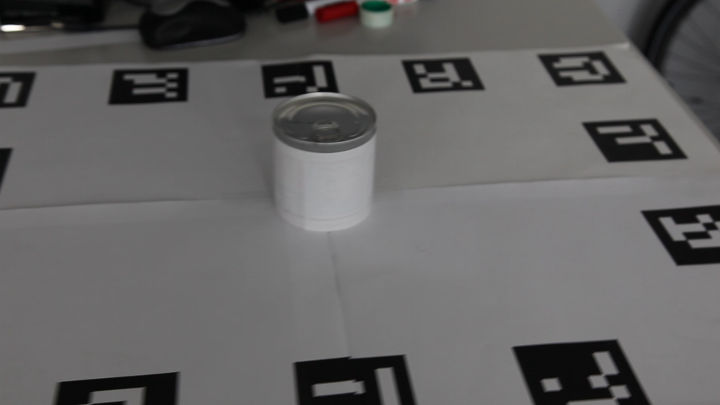
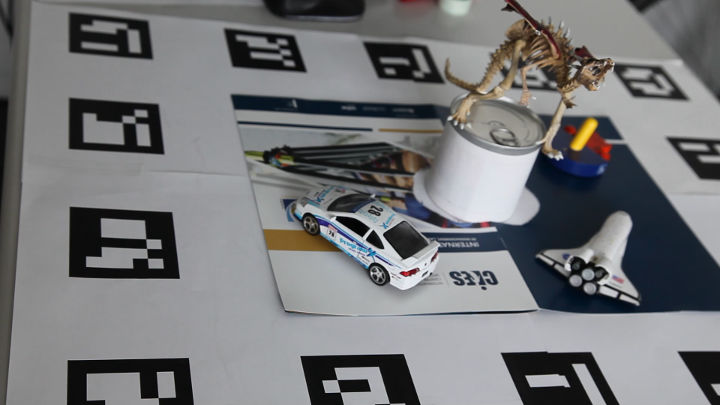
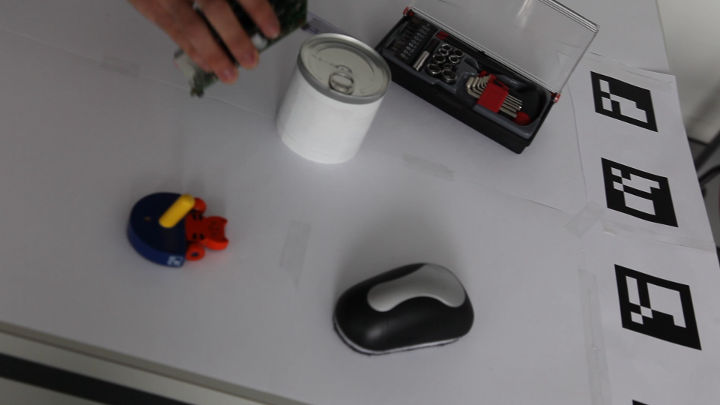
CAN

DOOR



2D ANNOTATIONS
Additionally, we provide accurate manual annotations of some parts of the target objects on the testing sequences. These can be used to test 2D detectors for localizing 3D objects undergoing perspective and light changes.




Part of the manual annotations were kindly provided by Mahdi Rad of the Graz Univertisy of Technology.
DOWNLOAD
Negative video BOX-Learn-video1 BOX-Learn-video2
BOX-Learn-video3 BOX-Learn-video4 BOX-Learn-video5
CAN-Learn-Part1 CAN-Learn-Part2 CAN-TestAndInfo
DOOR-Learn-Part1 DOOR-Learn-Part2 DOOR-TestAndInfo
EVALUATION
The 3D pose estimation can be evaluated computing the L2 norm of the rotation and translation components of the absolute pose error [2] for all the frame of each video sequence, and evaluating their Cumulative Distribution Function (CDF) .
Quantitative results are provided in [1] in the form of the normalized Area Under Curve (AUC) score for each error. The AUC score is computed dividing the area of the CDF curve by the max error of the graph. The max error was set to 0.5 for both rotation and translation for all frames. See [1] for further details.
DISCLAIMER – CONTACT
BIBLIOGRAPHY
Field Guide to Northern Tree-related Microhabitats: Descriptions and size limits for their inventory in boreal and hemiboreal forests of Europe and North America
Swiss Federal Institute for Forest, Snow and Landscape Research WSL, Switzerland, 2024.Data Champions Lunch Talks – Green Bytes: Data-Driven Approaches to EPFL Sustainability
Data Champions Lunch Talks – Green Bytes: Data-Driven Approaches to EPFL Sustainability, EPFL, CM 1 221, April 18, 2024.Comparison of Three Viral Nucleic Acid Preamplification Pipelines for Sewage Viral Metagenomics
Food and Environmental Virology. 2024. DOI : 10.1007/s12560-024-09594-3.How to Support Students to Develop Skills that Promote Sustainability
Teaching Transversal Skills for Engineering Studens: A Practical Handbook of Activities with Tangibles; EPFL, 2024.How to Support Students Giving Each Other Constructive Feedback, Especially When It Is Difficult to Hear
Teaching Transversal Skills for Engineering Studens: A Practical Handbook of Activities with Tangibles; EPFL, 2024.How teachers can use the 3T PLAY trident framework to design an activity that develops transversal skills
Teaching Transversal Skills for Engineering Studens: A Practical Handbook of Activities with Tangibles; EPFL, 2024.The conceptual foundations of innate immunity: Taking stock 30 years later
Immunity. 2024-04-09. Vol. 57, num. 4, p. 613-631. DOI : 10.1016/j.immuni.2024.03.007.Radio-Activities: Architecture and Broadcasting in Cold War Berlin
Cambridge, MA; London: MIT Press, 2024.No Last One
Revue Matières. 2024. num. 18.All That is Solid
Transcalar Prospects in Climate Crisis; Zurich: Lars Müller, 2024.[2] Sturm, J., Engelhard, N., Endres, F., Burgard, W., & Cremers, D. A benchmark for the evaluation of RGB-D SLAM systems. IROS 2012