This data is free of use for research purposes. However, should you publish results obtained with it, we would appreciate references to the corresponding papers.
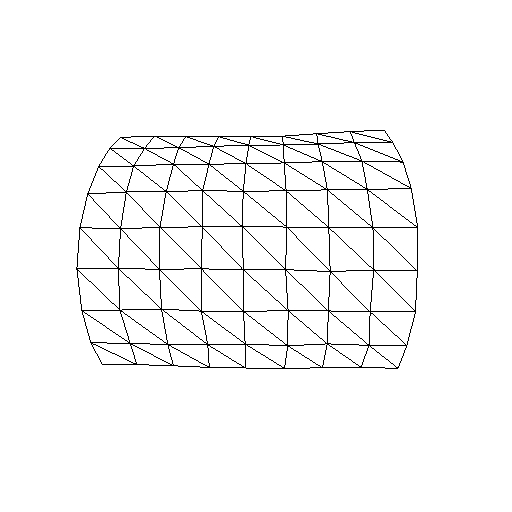
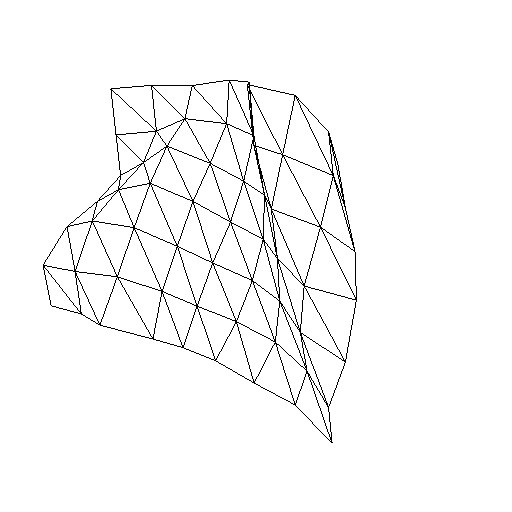
Click on an image below to download the corresponding dataset. Each file contains:
- a mesh,
- the camera internal and external parameters,
- a reference image,
- an image sequence,
- matches for each frame (except for the CVPR08 paper where we used template matching).
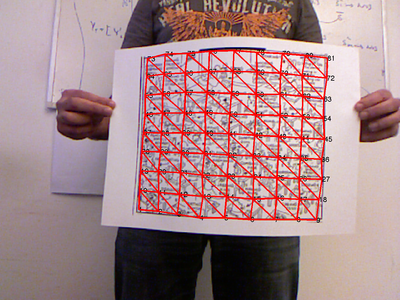
Each line of the match files encodes a 3D-to-2D correspondence, and contains:
- the vertex indices of the facet containing the match,
- the barycentric coordinates of the 3D point,
- an image location,
- in some cases, a match score never used in our experiments.
Motion Capture Data
- This data was acquired with a Vicon motion capture system. It contains one sequence of a deforming piece of cardboard and one sequence of a deforming piece of cloth. No images were acquired simultaneously, but synthetic images can easily be generated by texturing the meshes.
- The following links are to access full motion-captured datasets. The frames are not ordered and each line in the data files contains XYZ positions of mesh vertices.
Vicon Cardboard Capture
Vicon Cloth Capture
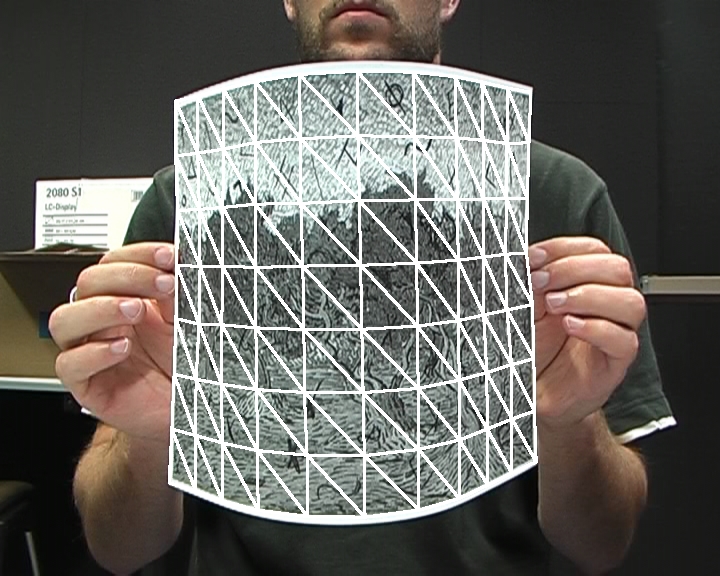
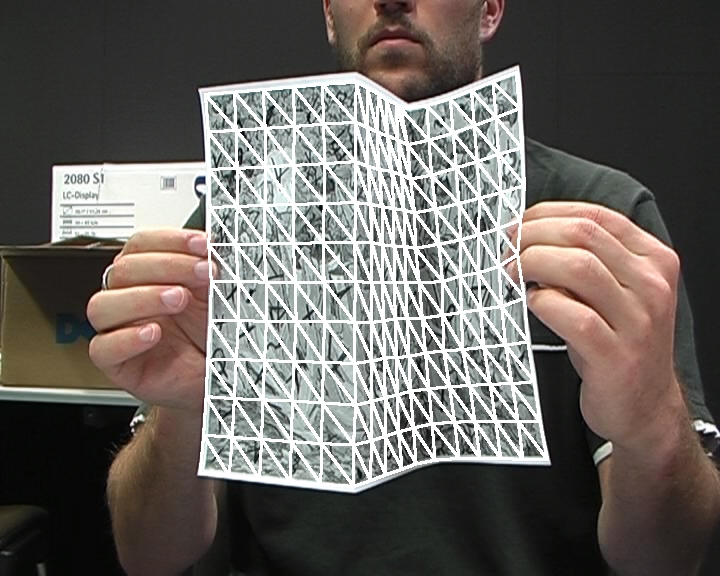
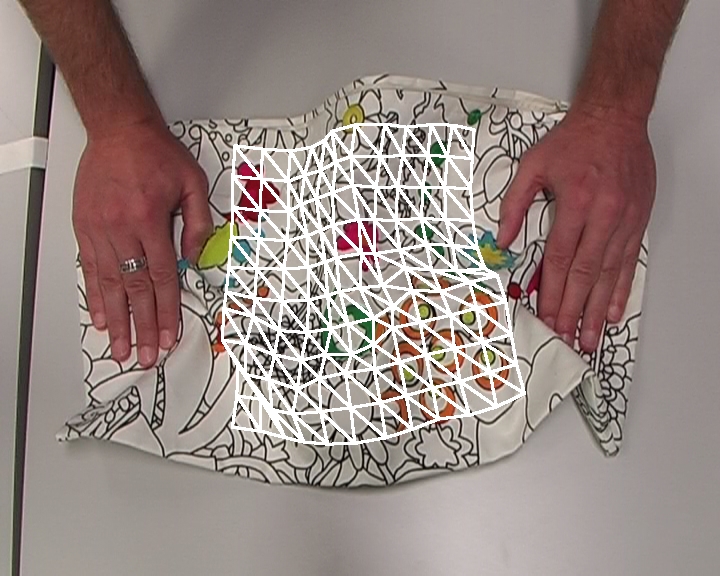
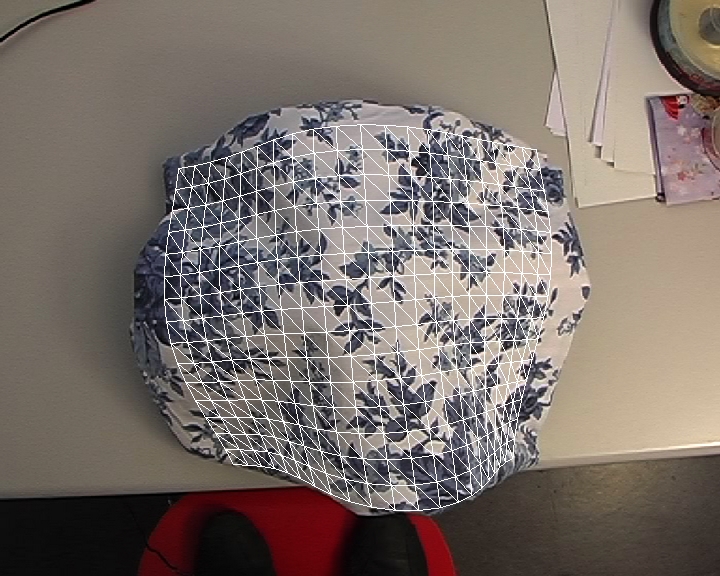
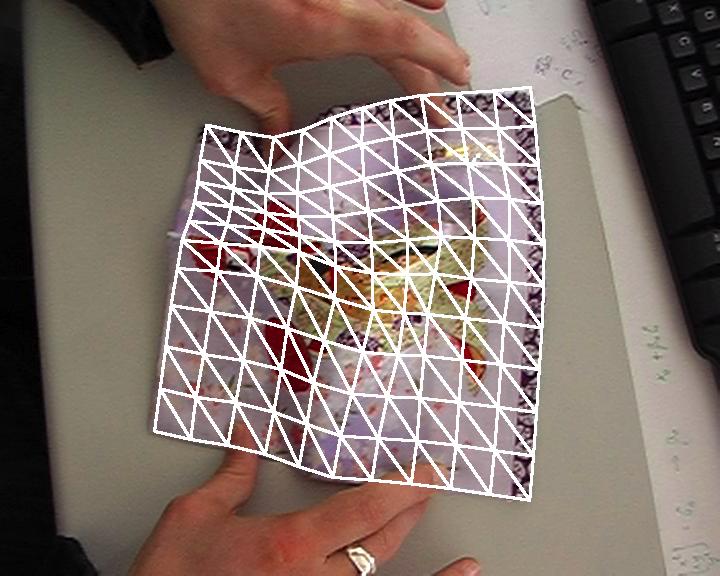
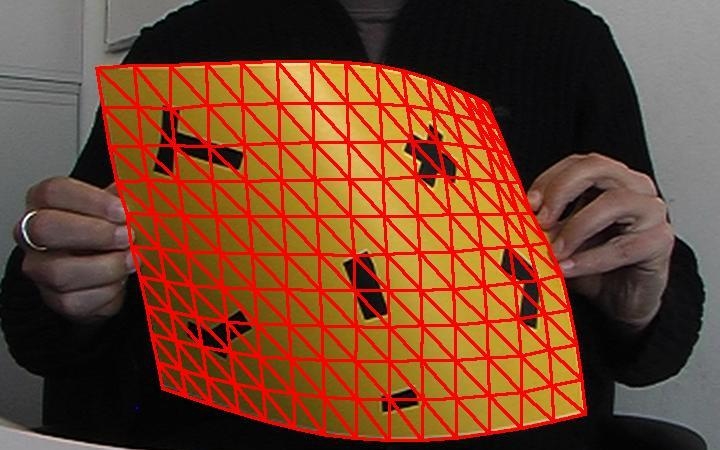
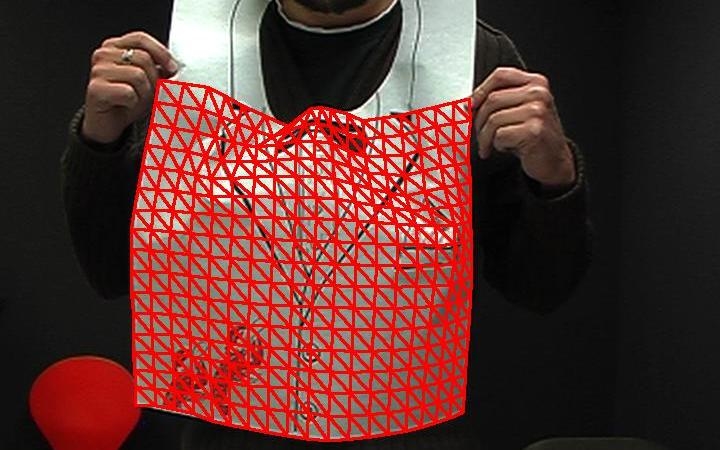
Sequences with Ground-Truth
Well-Textured Surfaces
Poorly-Textured Surfaces