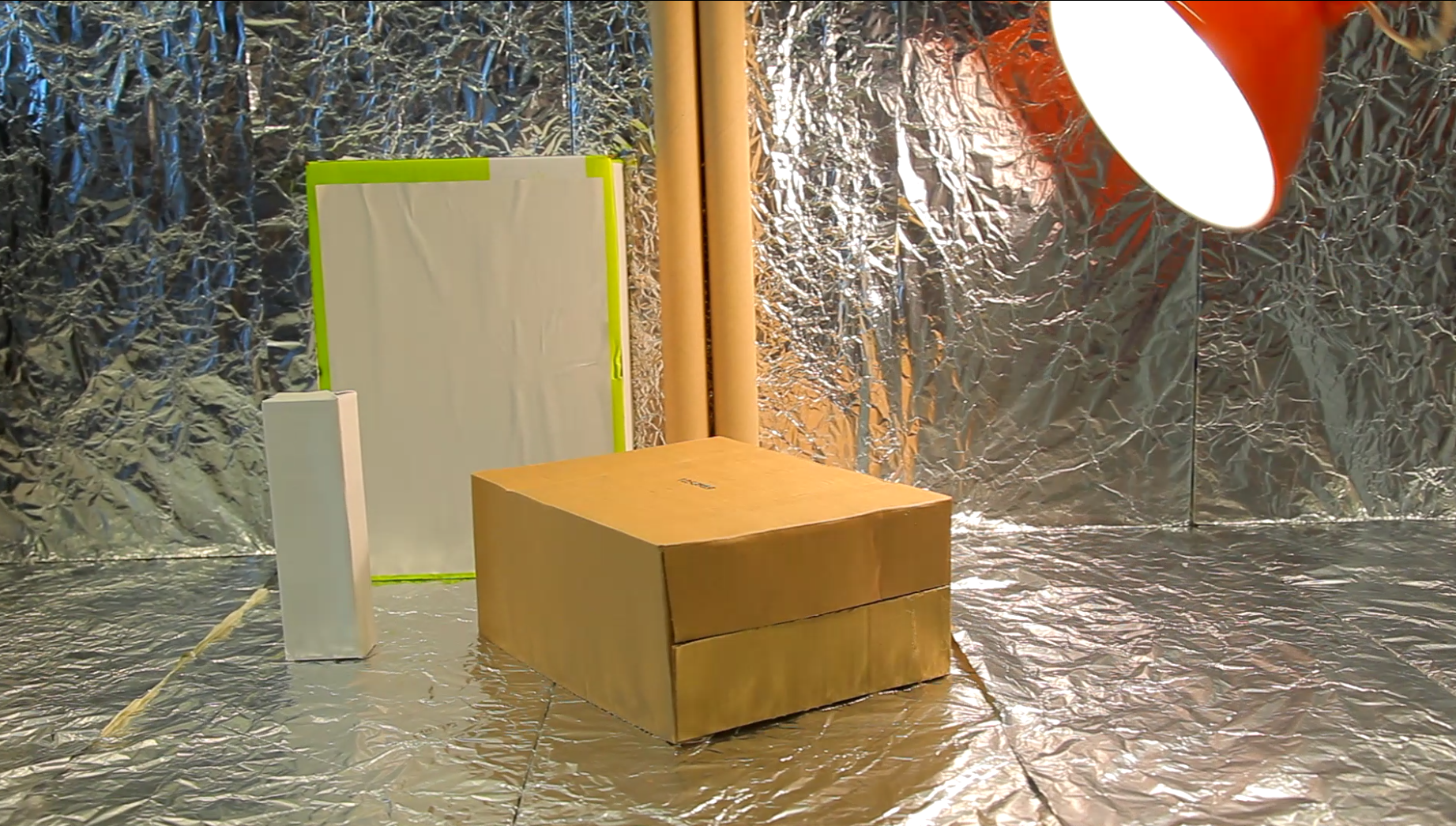
The dataset is made of 4 video sequences taken in two different scenes, an experimental setup and the ATLAS experiment at CERN. All video sequences show non-Lambertian objects with poor lighting conditions and a moving light source.
For each scene we provide :
- 2 video sequences (frames saved as .png images);
- a partial 3D model (.obj) of the scene and a set of calibrated reference frames;
- the internal calibration matrices for all the video frames and the reference frames;
- groundtruth poses for all the frames of each video.
See the README.txt file for further details.
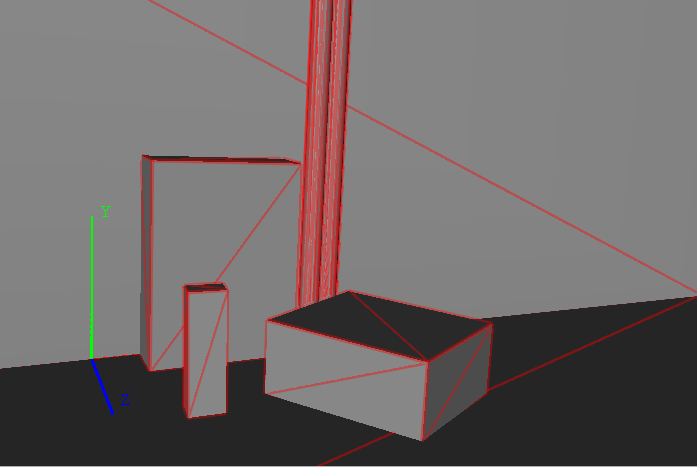
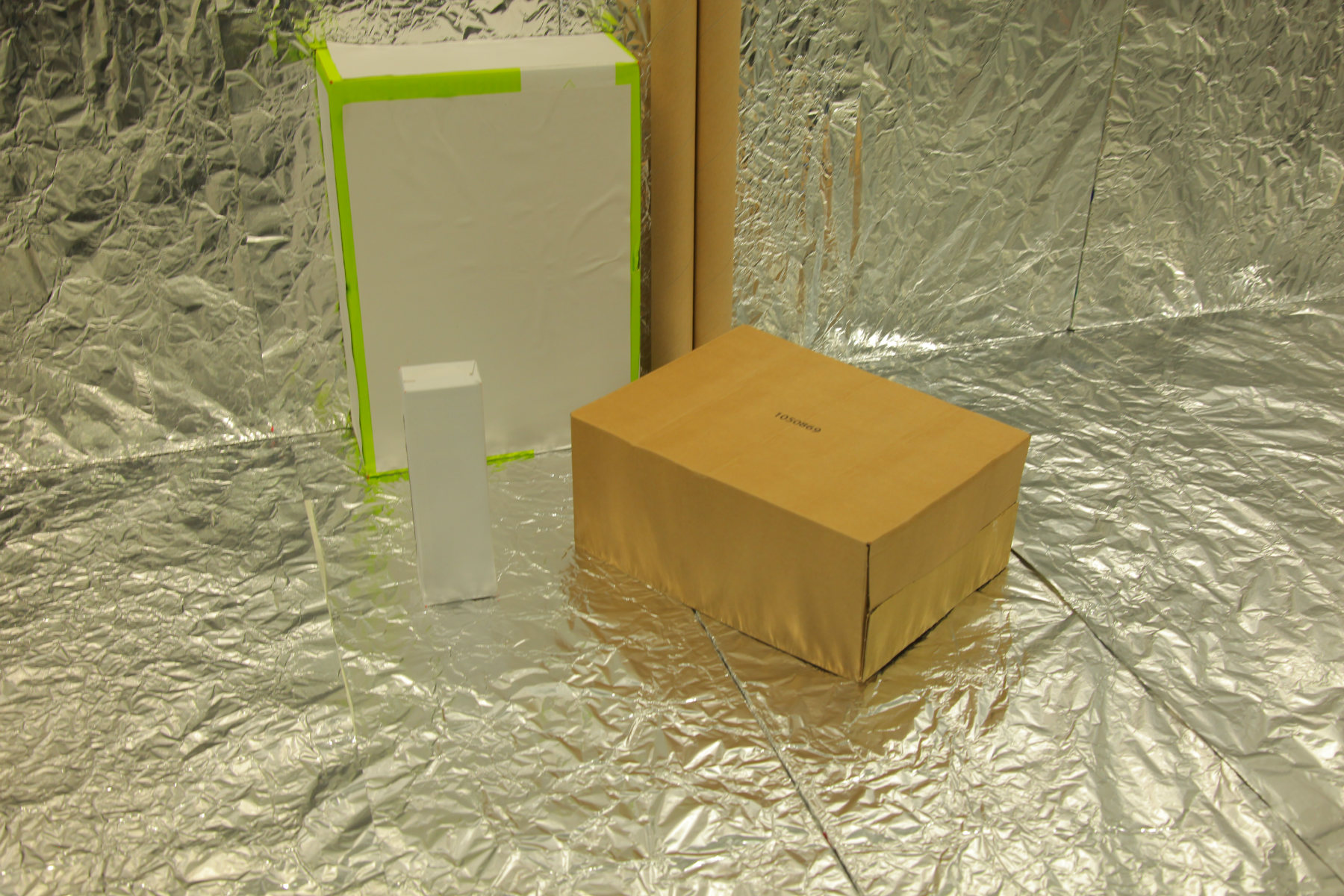
Experimental Setup
Two video sequences, one taken with a still camera (394 frames) and one with a moving camera (365 frames), and a 3D model with 168 triangles.

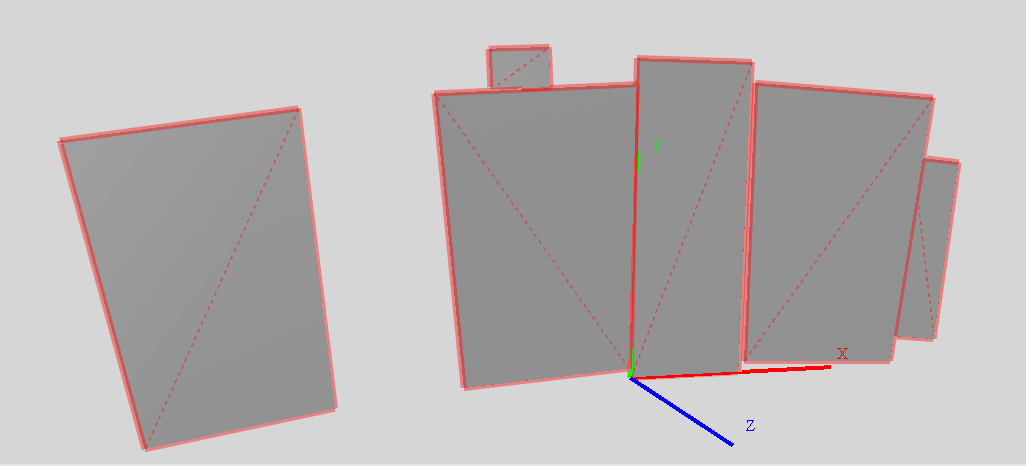
ATLAS Experiment
Two video sequences, one taken with a still camera (209 frames) and one with a moving camera ( 781 frames), and a 3D model with 12 triangles.



Disclaimer
You are free to download and use these data for research purposes only.
By downloading and using the dataset you agree to acknowledge its source (CVLab EPFL) and to cite the first paper of the list below in case results obtained with these data are published.