Accurate 3D human pose estimation from single images is possible with sophisticated deep-net architectures that have been trained on very large datasets. However, this still leaves open the problem of capturing motions for which no such database exists. Manual annotation is tedious, slow, and error-prone.
In this project, we propose to replace most of the annotations by the use of multiple views, at training time only. We propose the following two alternative methods.
Learning Monocular 3D Human Pose Estimation from Multi-view Images
| In this pose-centered approach, we train the system to predict the same pose articulated pose in all available views. Such a consistency constraint is necessary but not sufficient to predict accurate poses. We therefore complement it with a supervised loss aiming to predict the correct pose in a small set of labeled images, and with a regularization term that penalizes drift from initial predictions. Furthermore, we propose a method to estimate camera pose jointly with human pose, which lets us utilize multi-view footage where calibration is difficult, e.g., for pan-tilt or moving handheld cameras. We demonstrate the effectiveness of our approach on established benchmarks, as well as on a new Ski dataset with rotating cameras and expert ski motion, for which annotations are truly hard to obtain. | 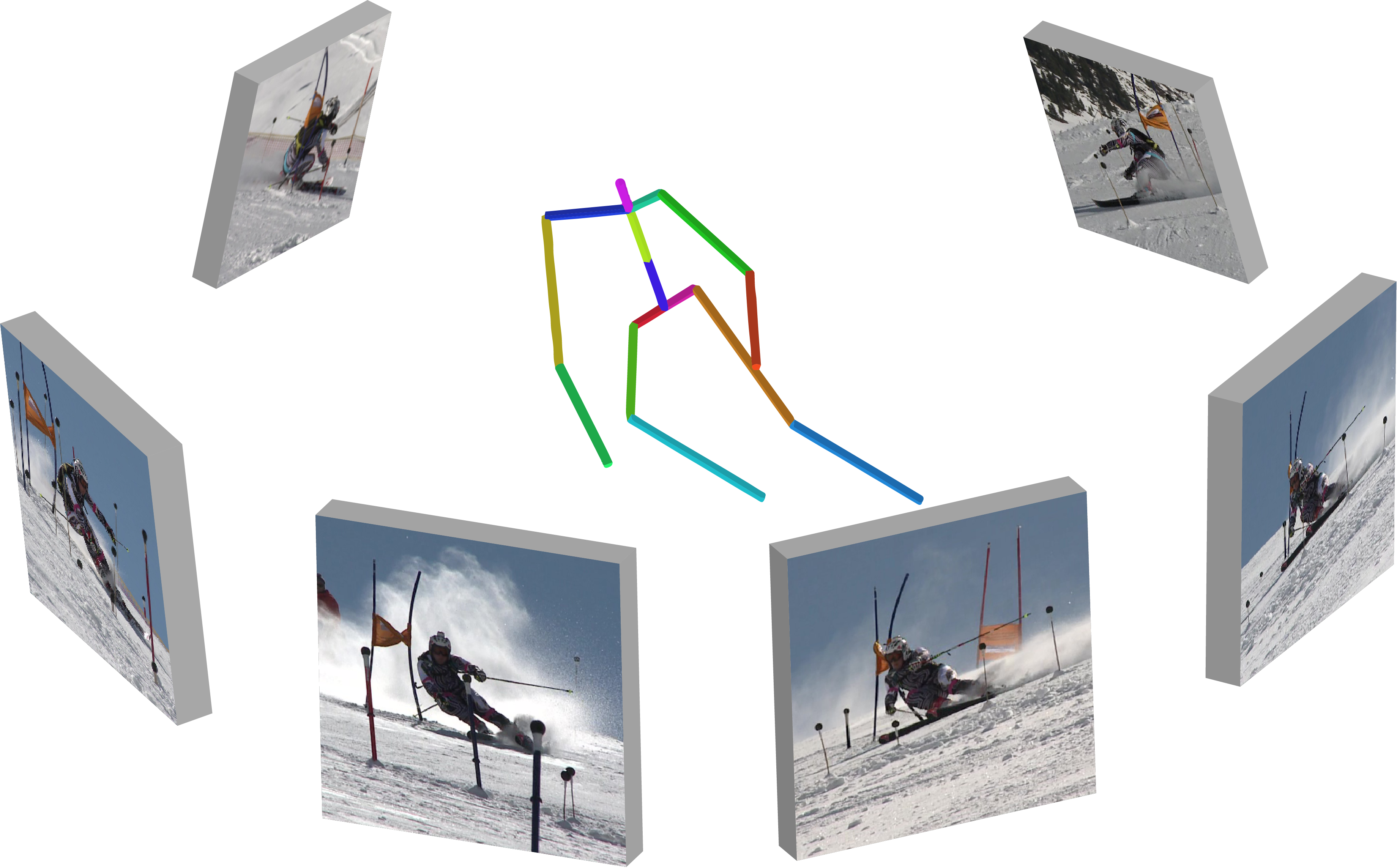 |
The new Ski-pose PTZ-camera dataset is available here: Ski-PosePTZ-Dataset.
Pre-print: https://arxiv.org/abs/1803.04775
Unsupervised Geometry-Aware Representation for 3D Human Pose Estimation

In this approach, we propose to overcome remaining problems by learning a geometry-aware body representation from multi-view images without any 3D annotations. To this end, we use an encoder-decoder that predicts an image from one viewpoint given an image from another viewpoint. Because this representation encodes 3D geometry, using it in a semi-supervised setting makes it easier to learn a mapping from it to 3D human pose. As evidenced by our experiments, our approach significantly outperforms fully-supervised methods given the same amount of labeled data, and improves over the first semi-supervised method while using as little as 1% of the labeled data.
Pre-print: https://arxiv.org/abs/1804.01110
Pytorch network definition and training code: github.com/hrhodin/
References
Formation of electron traps in semiconducting polymers via a slow triple-encounter between trap precursor particles
Science And Technology Of Advanced Materials. 2024-12-31. Vol. 25, num. 1, p. 2312148. DOI : 10.1080/14686996.2024.2312148.Data-driven LPV Disturbance Rejection Control with IQC-based Stability Guarantees for Rate-bounded Scheduling Parameter Variations
2024-12-16. 63rd IEEE Conference on Decision and Control (CDC 2024)Milano Congressi (MiCo), Milan, Italy, December 16-19, 2024.Fine Arts in Transition: An Operative Research and Teaching Approach between Analogue and Digital
Lausanne: EPFL Press, 2024-09-30.Validation and Application of Hysteresis Loss Model for HTS Stacks and Conductors for Fusion Applications
Ieee Transactions On Applied Superconductivity. 2024-08-01. Vol. 34, num. 5, p. 4704105. DOI : 10.1109/TASC.2024.3369584.Performance Comparison of Cables With Partial Transposition
Ieee Transactions On Applied Superconductivity. 2024-08-01. Vol. 34, num. 5, p. 4803205. DOI : 10.1109/TASC.2024.3367804.Quench Detection and Temperature Measurement With Fiber Optic Sensors
Ieee Transactions On Applied Superconductivity. 2024-08-01. Vol. 34, num. 5, p. 9001005. DOI : 10.1109/TASC.2023.3346855.Design of a Beam Separator for FLASH Electron Therapy Facilities
Ieee Transactions On Applied Superconductivity. 2024-08-01. Vol. 34, num. 5, p. 4401005. DOI : 10.1109/TASC.2023.3341895.Flow and Snow in Complex Terrain
International Union of Geodesy and Geophysics (IUGG), Berlin, Germany, July 12-16, 2023.Data-Driven Control Synthesis using Koopman Operator: A Robust Approach
2024-07-12